At this stage of our preprocessing flow, we have our images calibrated, cosmetically corrected and graded. Star alignment allows us to take all of our images orient them in the same position so we can later integrate into a single image.
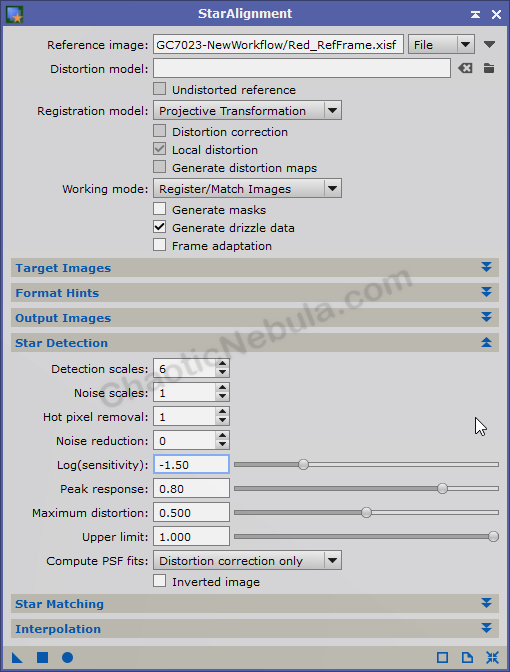
In order for star alignment to work, you have to identify a reference frame that is used as our baseline image. When we did the Subframe Selector process, each image was graded based on FWHM, eccentricity, SNR, star count, etc. It is best to select the very best frame as your reference image.
Also, make sure generate drizzle data is selected as this might be something you want to do later. The drizzle file creation is fast and takes very little storage space, so it won’t have a major impact on your processing.
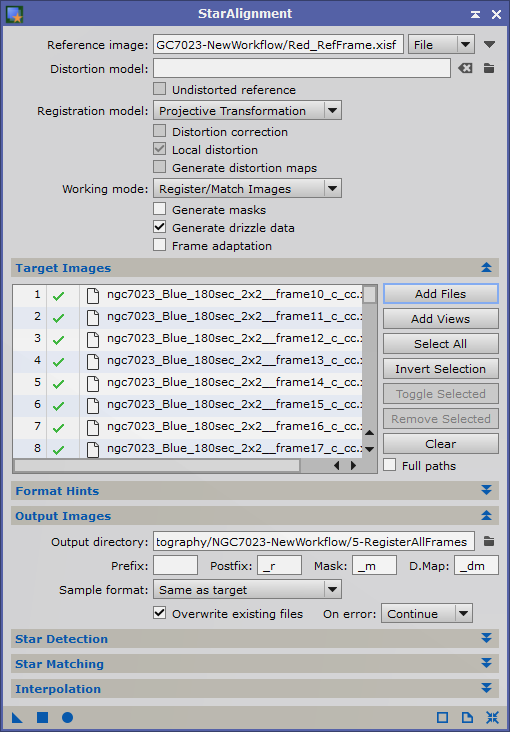
For target images, there are two approaches:
- Per Filter: In a per filter scenario, your target images are identity from a filter perspective. The reference frame is of the same filter. I’ve seen many tutorials suggesting this approach, but I prefer the alternative.
- Entire Set: In the entire set scenario, you select all frames, regardless of filter characteristics. This way, all of your images, regardless of filter, will be aligned. So later in the image processing, we will have master images for each filter. If we run star alignment on a per-filter basis, we will have to rerun star alignment on our filter-specific master frames. I say do it once.
And that is all there is to do with PixInsight Star Alignment. Defaults often work best here.
Star Alignment Issues
Sometimes, the defaults don’t work and you see this error
“Unable to find a valid set of star pair matches”
This is when we start to tweak the Star Detection and Star Matching parameters.
Star Detection Issues
When you run into issues with Star Alignment, you need to first see what is being identified as stars. PixInsight Star Alignment allows you to change the Working mode to Detected Stars.
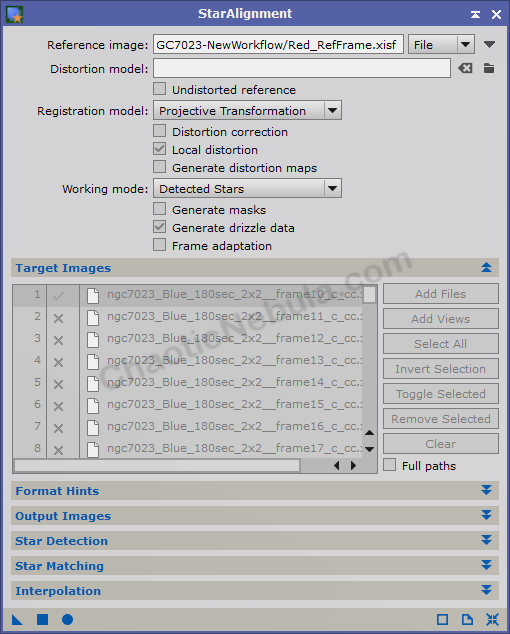
Open the image you are struggling with and drag the star alignment triangle onto the image. You will then have the detected star image. Aligning these two images on top of each other will let you Control+PageDown to flip between the two to verify that detected stars are really detected stars.
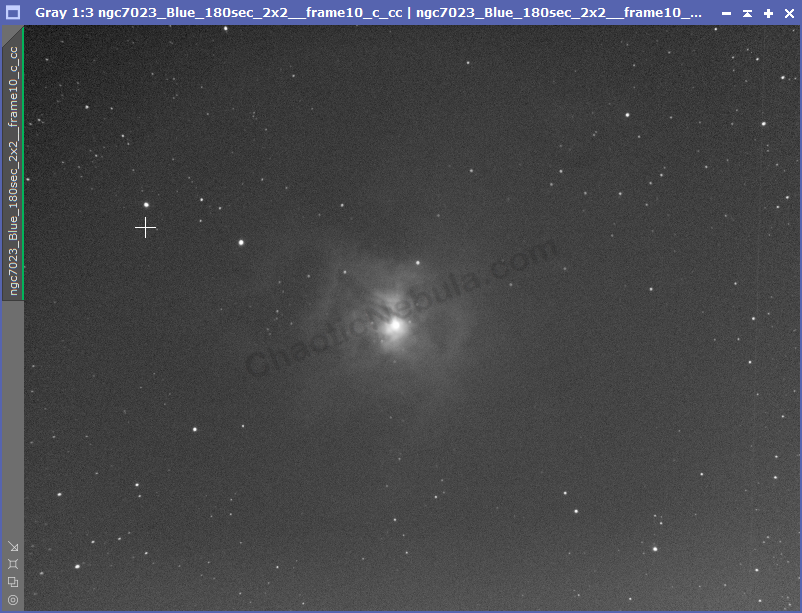
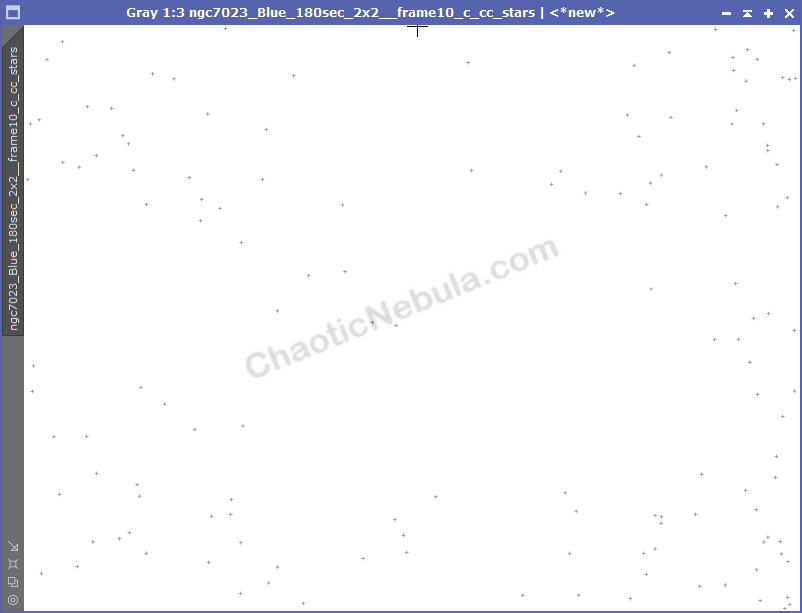
These images are actually quite good, so it was easy for the star detection process to work.
Depending on the detected stars, you might need to make some modifications
- Detection Scales: Increasing this will allow the process to use bigger structures as stars. Depending on your imaging rig, this might need to be increased if you are dealing with high magnification and bright stars. Or you might need to decrease if the process is missing small stars.
- Noise: Sometimes, identifying a lot of stars is bad in that some of the items detected are not stars, but are instead noise. Increasing the noise scale will help remove noise as potential stars.
- Noise Reduction: If your frames have a lot of noise and the noise is being detected as stars, start increasing the noise reduction parameter.
- Log(Sensitivity): This parameter will determine the size of stars to detect. Lowering it will help the process detect smaller stars, increasing detects larger stars.
Some of these parameters go hand-in-hand. It is best to make a change and see what happens to the detected star image. Are you detecting more? Bigger stars? Less noise?
Star Matching Issues
Even if the right stars are being detected, we might have an issue with matching stars to the reference frame. This is why it is important that the reference frame be high quality as it makes it easier to match stars. Even when that is the case, we might still run into issues and that is when we can switch the working mode of star alignment to Matched Stars
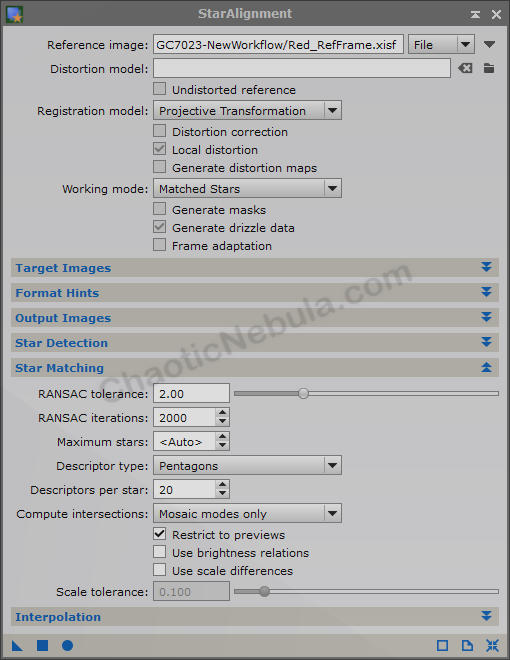
Matched stars shows us what items in our image are successfully matched to the reference frame. Notice how the identified stars is slightly different than the matched stars.
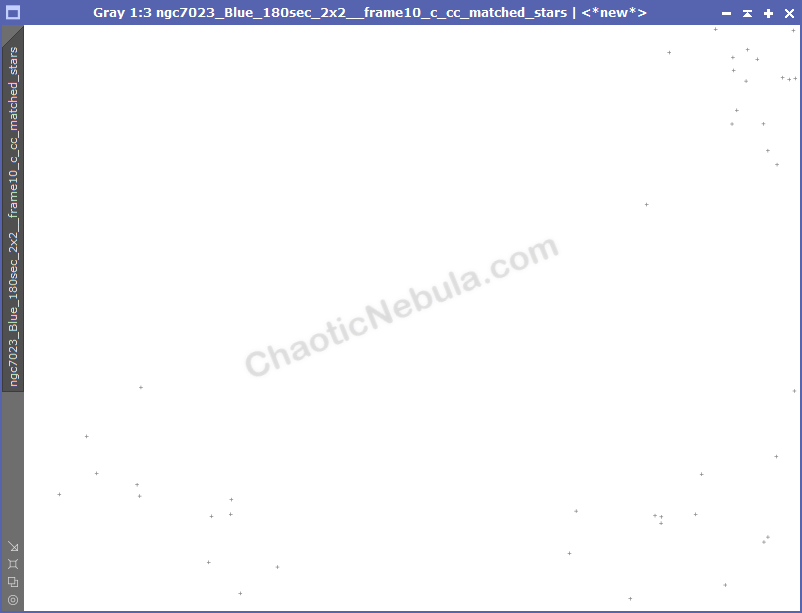
We can now see how changes in the star matching process impacts our matched stars.
- RANSAC Tolerance: When you have distortion (common in mosaics), you need to increase the tolerance (or how far away can a star be from the predicted location)
- RANSAC Iterations: You can increase this so the process tries more combinations, but most likely it will not help.
- Descriptor Type: Defines how the detected star will be defined. For scenarios where there is distortion (mosaics), the descriptor might need to be changed to quadrilaterals or another polygon with more sides. Increasing the polygon sides will also increase processing time.
What’s Next
The next step is to take normalize the brightness of all images with PixInsight Local Normalization.